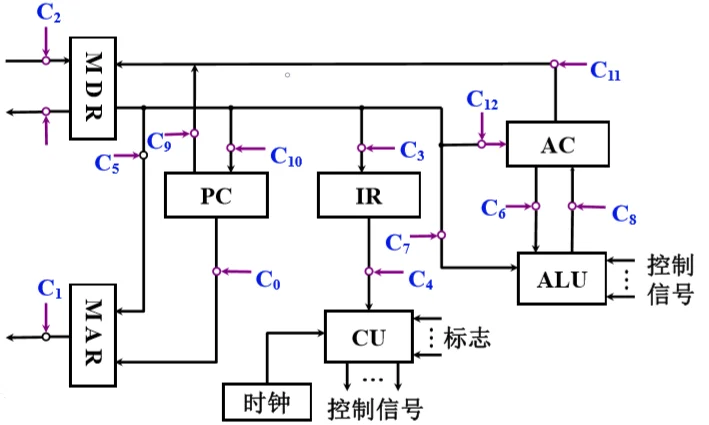
组合逻辑控制单元框图 @
CU 外特性 @
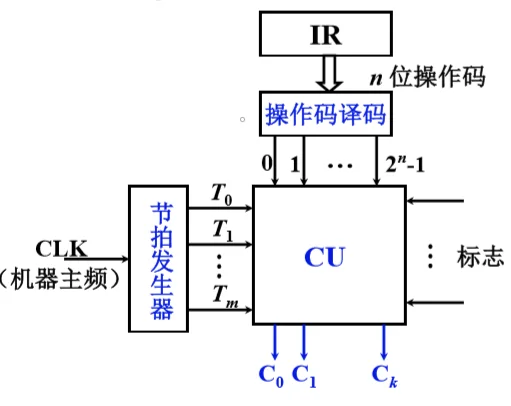
CU 发出控制信号,信号之间有先后关系,节拍发生器产生的节拍作为 CU 的输入,节拍发生器外接入 CLK(机器主频),产生多个节拍信号,每个节拍信号的起始端,CU 会产生命令,IR 的指令的操作码部分需要译码,n 位操作码可以译码出 $2^n$ 个结果。
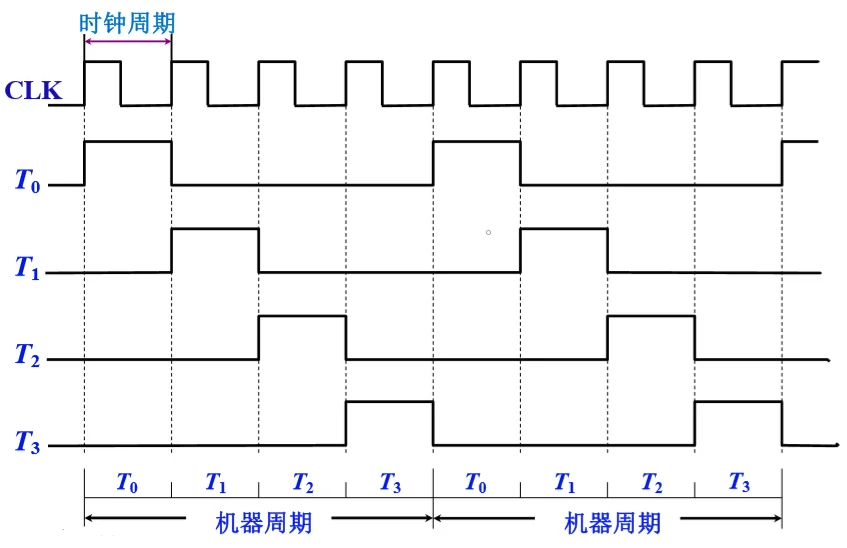
节拍信号 @
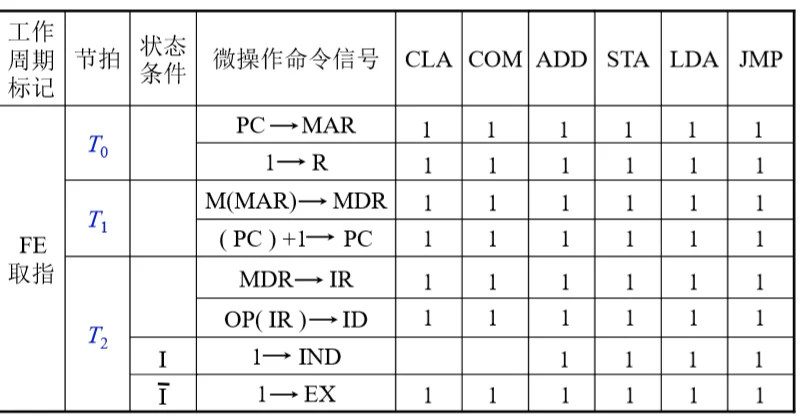
微操作的节拍安排 @
采用同步控制方式,也就是有一个统一的时钟信号来控制各个部件之间的交互,假设我们所设计一个机器周期内有三个节拍(时钟周期),并且 CPU 内部结构采用非总线方式。
安排微操作时许的原则 @
- 微操作的先后顺序不得随意更改
- 被控对象不同的微操作尽量安排在一个节拍内完成
- 占用时间较短的微操作,尽量安排在一个节拍内完成,并允许有先后顺序
取指周期微操作的节拍安排 @
-
$T_0$,不同的微操作可以安排在一个周期内完成
- PC->MAR
- 1->R
-
$T_1$,同样按照原则二
- M(MAR)->MDR
- (PC)+1->PC
-
$T2$,两个微操作占用时间较短,一个微操作可在时钟周期的上升沿,一个在下降沿完成
- MDR->IR
- OP(IR)->ID
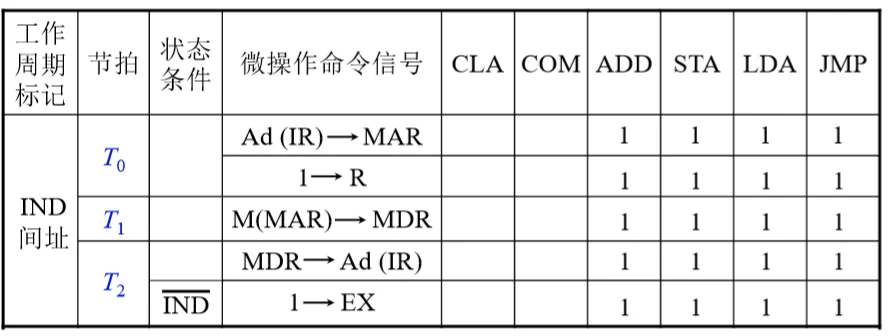
间址周期微操作的节拍安排 @
- $T_0$
- Ad(IR)->MAR
- 1->R
- $T_1$
- M(MAR)->MDR
- $T_2$
- MDR->Ad(IR)
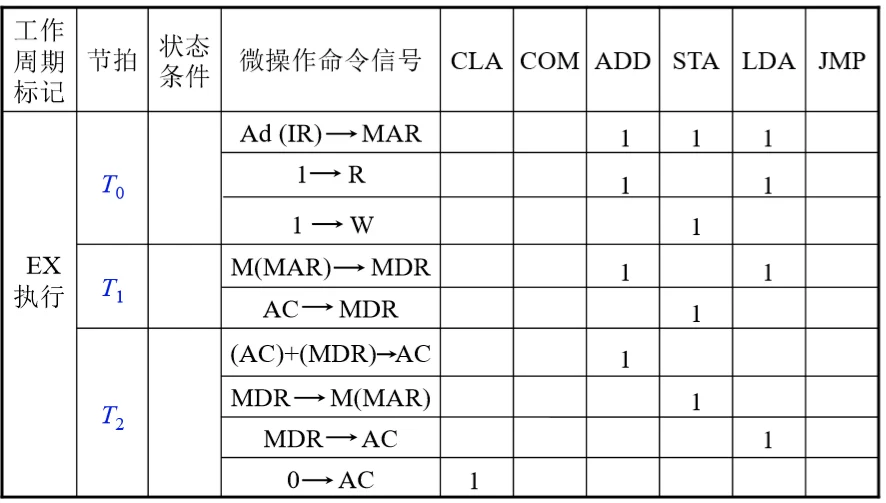
执行周期微操作的节拍安排 @
-
CLA(对累加器进行清零),$T_2$: 0->AC
-
COM(对累加器的内容按位取反),$T_2$: AC(取反)->AC
-
SHR(AC 当中保存的内容右移),$T_2$: L(AC)->R(AC),$AC_0−>AC_0$
-
CSL(循环左移),$T_2$: R(AC)->L(AC),$AC_0−>AC_n$
-
STP(停机命令),$T_2$: 0-G
-
ADD X(将 X 寄存器保存的内容和 AC 的内容相加)
- $T_0$,Ad(IR)->MAR
- $T_1$,M(MAR)->MDR
- $T_2$,(AC)+(MDR)->AC
-
STA X(将 AC 的数据存入 X 中)
- $T_0$,Ad(IR)->MAR
- $T_1$,AC->MDR
- $T_2$,MDR->M(MAR)
-
LDA X(将 X 中的数据取出送入 CPU 并且保存进 AC)
- $T_0$,Ad(IR)->MAR
- $T_1$,M(MAR)->MDR
- $T_2$,MDR->AC
-
JMP X(跳转到给定的地址),$T_2$: MDR->AC
中断周期微操作的节拍安排 @
- $T_0$: 0->MAR; 1->W
- $T_1$: PC->MDR
- $T_2$: MDR->M(MAR);向量地址->PC
组合逻辑设计步骤 @
列出操作时间表 @
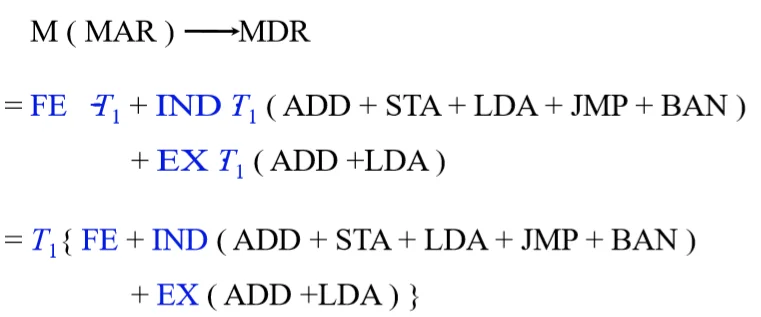
写出微操作命令的最简表达式 @
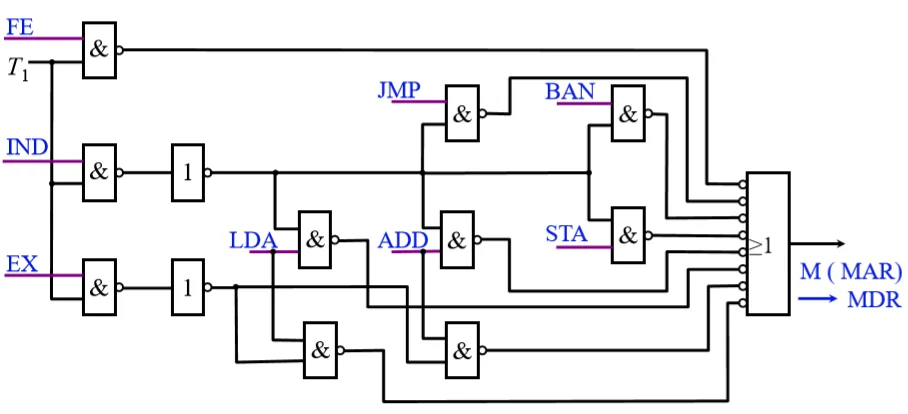
画出逻辑图 @
思路清晰,简单明了
庞杂,调试困难,修改困难
速度快(RISC)